Path Planning using Neural A* Search
ICML2021'%3e%3cmetadata%20id='metadata16'%3e%3crdf:RDF%3e%3ccc:Work%20rdf:about=''%3e%3cdc:format%3eimage/svg+xml%3c/dc:format%3e%3cdc:type%20rdf:resource='http://purl.org/dc/dcmitype/StillImage'%20/%3e%3cdc:title%3e%3c/dc:title%3e%3c/cc:Work%3e%3c/rdf:RDF%3e%3c/metadata%3e%3cdefs%20id='defs14'%3e%3cclipPath%20clipPathUnits='userSpaceOnUse'%20id='clipPath28'%3e%3cpath%20d='M%200,1080%20H%201920%20V%200%20H%200%20Z'%20id='path26'%20/%3e%3c/clipPath%3e%3cclipPath%20clipPathUnits='userSpaceOnUse'%20id='clipPath128'%3e%3cpath%20d='M%200,1080%20H%201920%20V%200%20H%200%20Z'%20id='path126'%20/%3e%3c/clipPath%3e%3cclipPath%20clipPathUnits='userSpaceOnUse'%20id='clipPath18'%3e%3cpath%20d='M%200,1080%20H%201920%20V%200%20H%200%20Z'%20id='path16'%20/%3e%3c/clipPath%3e%3c/defs%3e%3csodipodi:namedview%20pagecolor='%23ffffff'%20bordercolor='%23666666'%20borderopacity='1'%20objecttolerance='10'%20gridtolerance='10'%20guidetolerance='10'%20inkscape:pageopacity='0'%20inkscape:pageshadow='2'%20inkscape:window-width='1440'%20inkscape:window-height='914'%20id='namedview12'%20showgrid='false'%20fit-margin-top='0'%20fit-margin-left='0'%20fit-margin-right='0'%20fit-margin-bottom='0'%20inkscape:zoom='0.434375'%20inkscape:cx='484.54599'%20inkscape:cy='90.825431'%20inkscape:window-x='-6'%20inkscape:window-y='-6'%20inkscape:window-maximized='1'%20inkscape:current-layer='g18'%20/%3e%3cg%20id='g18'%20inkscape:groupmode='layer'%20inkscape:label='SINICX_Logo_2024_06%20(1)'%20transform='matrix(1.3333333,0,0,-1.3333333,-871.99998,786.66665)'%3e%3cg%20id='g122'%3e%3cg%20id='g124'%20clip-path='url(%23clipPath128)'%3e%3cg%20id='g130'%20transform='translate(1236,540)'%3e%3cpath%20d='m%200,0%20c%200,14.984%209.494,26.752%2030,27.5%20l%20-2,20%20C%20-3,45.572%20-22,25%20-22,0%20c%200,-25%2019,-45.572%2050,-47.5%20l%202,20%20C%209.494,-26.752%200,-14.984%200,0%20m%20-74,47.5%20-2,-20%20c%2020.506,-0.748%2030,-12.516%2030,-27.5%200,-14.984%20-9.494,-26.752%20-30,-27.5%20l%202,-20%20c%2031,1.928%2050,22.5%2050,47.5%200,25%20-19,45.572%20-50,47.5%20M%20-158,-50%20c%2010.163,0%2023.222,1.516%2035.5,7.5%20l%201,21.5%20c%20-15.419,-7.98%20-24.349,-9.5%20-34,-9.5%20-22.885,0%20-35,10.715%20-35,30.5%200,20.281%2011.498,31%2033.5,31%2010.539,0%2019.19,-2.25%2033.5,-10%20l%20-1,21%20c%20-12.951,6.497%20-23.605,8%20-33.5,8%20-34.125,0%20-55.5,-19.341%20-55.5,-50%200,-30.784%2021.128,-50%2055.5,-50%20m%20-103.5,2.5%20h%2022%20v%2095%20h%20-22%20z%20M%20-536,-50%20c%2027.127,0%2042,11.809%2042,30.326%200,23.018%20-24.358,28.393%20-43.5,31.7%20-13.347,2.306%20-23,4.28%20-23,10.8%200,5.697%206.895,8.092%2021.673,8.092%2013.023,0%2027.965,-2.697%2040.327,-7.592%20l%20-1,21%20C%20-515.737,49.045%20-526.907,50%20-539,50%20c%20-26.578,0%20-43,-10.415%20-43,-27.122%200,-22.856%2023.488,-27.807%2042.038,-31.027%2013.246,-2.343%2024.462,-4.36%2024.462,-12.006%200,-8.118%20-10.957,-10.019%20-20.5,-10.019%20-15.487,0%20-27.243,4.543%20-45.5,13.674%20l%201,-22.5%20c%2015.24,-7.948%2031.788,-11%2044.5,-11%20m%2077.5,2.5%20h%2022%20v%2095%20h%20-22%20z%20m%2060.5,95%20h%2021%20l%2055,-63.5%20v%2063.5%20h%2022%20v%20-95%20h%20-21%20L%20-376,16%20v%20-63.5%20h%20-22%20z'%20style='fill:%23000000;fill-opacity:1;fill-rule:nonzero;stroke:none'%20id='path132'%20/%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
TL;DR Novel data-driven search-based planner based on differentiable A*
Overview
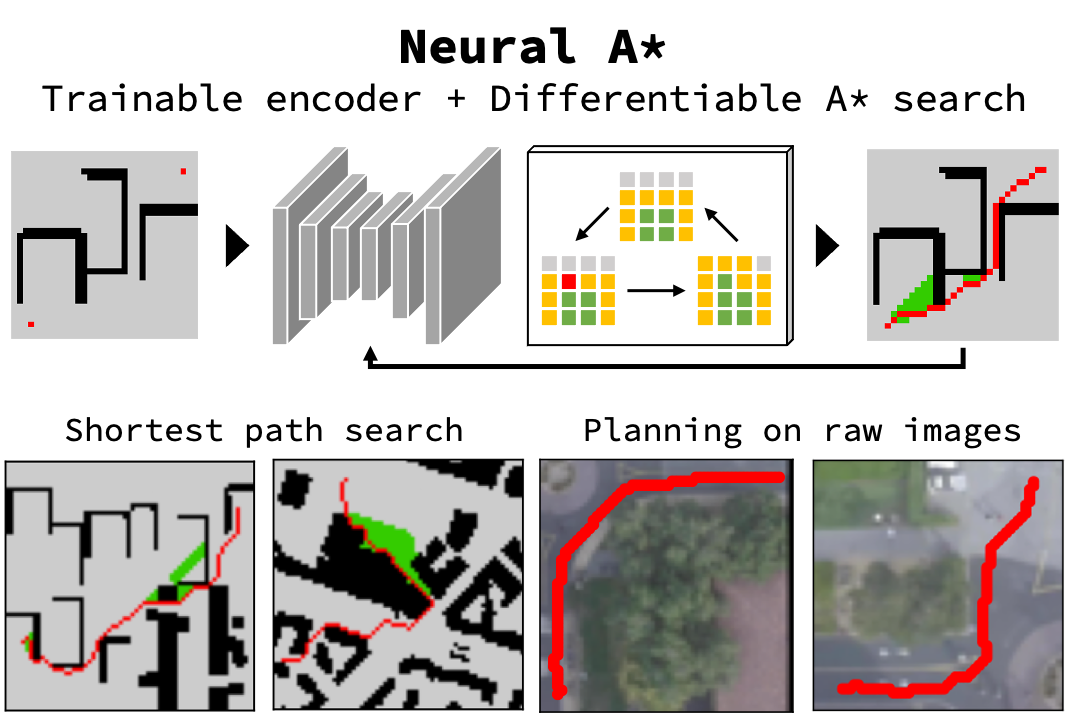
We present Neural A*, a novel data-driven search method for path planning problems. Despite the recent increasing attention to data-driven path planning, machine learning approaches to search-based planning are still challenging due to the discrete nature of search algorithms. In this work, we reformulate a canonical A* search algorithm to be differentiable and couple it with a convolutional encoder to form an end-to-end trainable neural network planner. Neural A* solves a path planning problem by encoding a problem instance to a guidance map and then performing the differentiable A* search with the guidance map. By learning to match the search results with ground-truth paths provided by experts, Neural A* can produce a path consistent with the ground truth accurately and efficiently. Our extensive experiments confirmed that Neural A* outperformed state-of-the-art data-driven planners in terms of the search optimality and efficiency trade-off. Furthermore, Neural A* successfully predicted realistic human trajectories by directly performing search-based planning on natural image inputs.
Neural A*
We reformulate a canonical A* search algorithm to be differentiable as a module referred to as the differentiable A*, by combining a discretized activation technique with basic matrix operations. This module enables us to perform an A* search in the forward pass of a neural network and back-propagate losses through every search step to other trainable backbone modules.
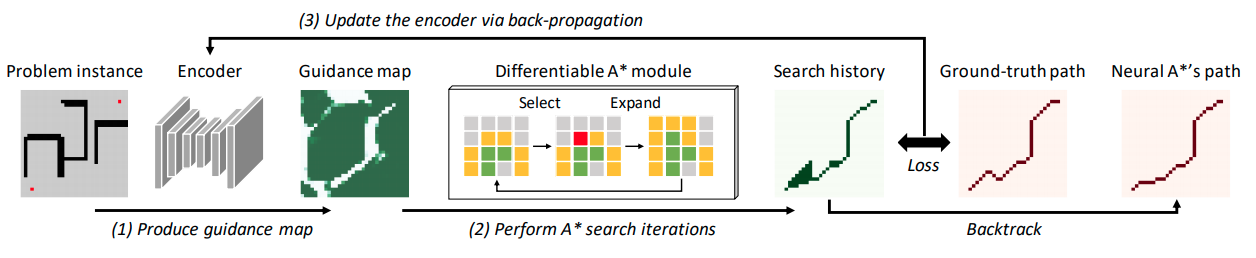
As illustrated in the figure above, Neural A* consists of the combination of a fully-convolutional encoder and the differentiable A* module, and is trained as follows: (1) Given a problem instance (i.e., an environmental map annotated with start and goal points), the encoder transforms it into a scalar-valued map representation referred to as a guidance map; (2) The differentiable A* module then performs a search with the guidance map to output a search history and a resulting path; (3) The search history is compared against the ground-truth path of the input instance to derive a loss, which is back-propagated to train the encoder.
Results
Point-to-Point Shortest Path Problems
We conducted an extensive experiment to evaluate the effectiveness of Neural A* for point-to-point shortest path problems. By learning from optimal planners, Neural A* outperformed state-of-the-art data-driven search-based planners in terms of the trade-off between search optimality and efficiency. 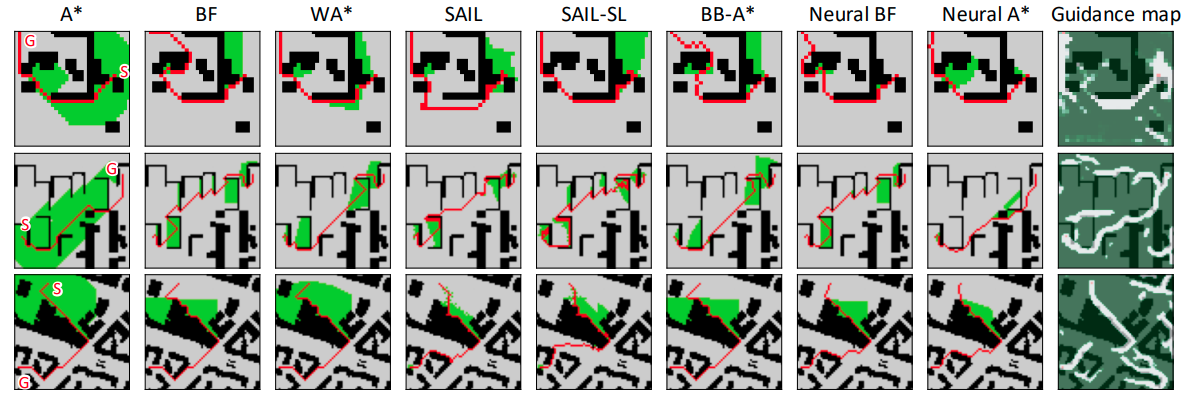
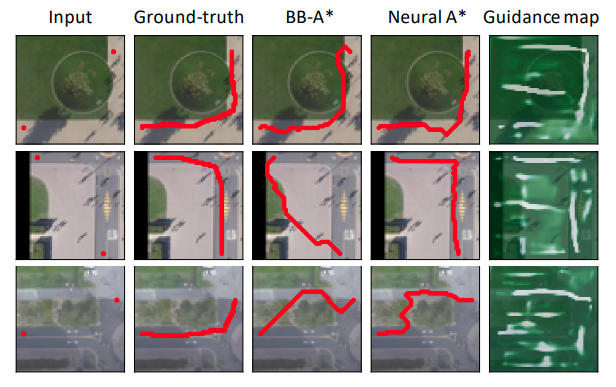
Path Planning on Raw Image Inputs
We also address the task of planning paths directly on raw image inputs. Suppose a video of an outdoor scene taken by a stationary surveillance camera. Given planning demonstrations consisting of color images of the scene and actual trajectories of pedestrians, Neural A* can predict realistic trajectories consistent with those of pedestrians when start and goal locations are provided.
Contact
Citation
# ICML2021 version @InProceedings{pmlr-v139-yonetani21a,
title = {Path Planning using Neural A* Search},
author = {Ryo Yonetani and
Tatsunori Taniai and
Mohammadamin Barekatain and
Mai Nishimura and
Asako Kanezaki},
booktitle = {Proceedings of the 38th International Conference on Machine Learning},
pages = {12029--12039},
year = {2021},
editor = {Meila, Marina and Zhang, Tong},
volume = {139},
series = {Proceedings of Machine Learning Research},
month = {18--24 Jul},
publisher = {PMLR},
pdf = {http://proceedings.mlr.press/v139/yonetani21a/yonetani21a.pdf},
url = {http://proceedings.mlr.press/v139/yonetani21a.html},
}
# arXiv version @article{DBLP:journals/corr/abs-2009-07476,
author = {Ryo Yonetani and
Tatsunori Taniai and
Mohammadamin Barekatain and
Mai Nishimura and
Asako Kanezaki},
title = {Path Planning using Neural A* Search},
journal = {CoRR},
volume = {abs/2009.07476},
year = {2020},
url = {https://arxiv.org/abs/2009.07476},
archivePrefix = {arXiv},
eprint = {2009.07476},
timestamp = {Wed, 23 Sep 2020 15:51:46 +0200},
biburl = {https://dblp.org/rec/journals/corr/abs-2009-07476.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}